Наборы роботов для Arduino
Конструктор робот Ардуино Робот Arduino - это не просто игрушка, а полноценный конструктор робототехники, идеально подходящий для школьного обучения. Его разнообразие функций и возможностей делает его отличным инструментом для изучения основ робототехники и развития навыков в области науки, технологии, инженерии и математики. Этот программируемый конструктор позволяет ученикам не только собирать робота, но и настраивать его для выполнения различных задач. Они могут экспериментировать, адаптировать робота под свои нужды и наблюдать, как он выполняет поставленные задания. Это уникальный способ применения теоретических знаний на практике.












")
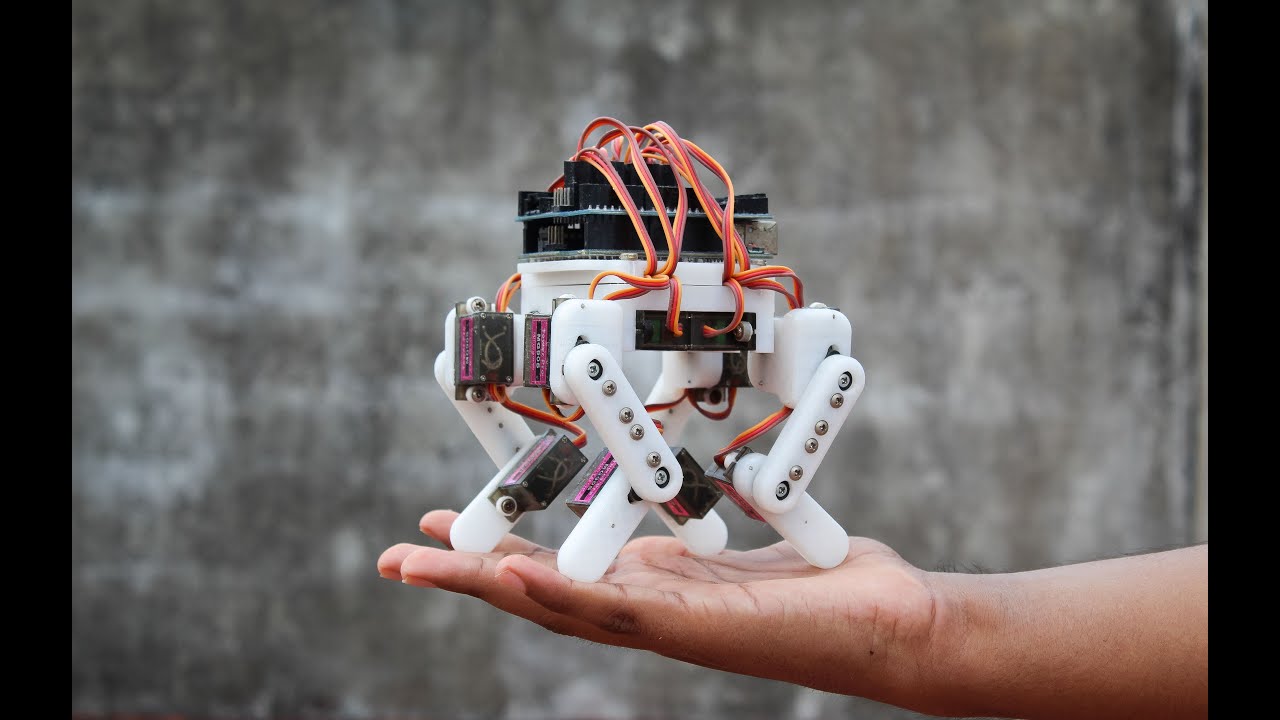
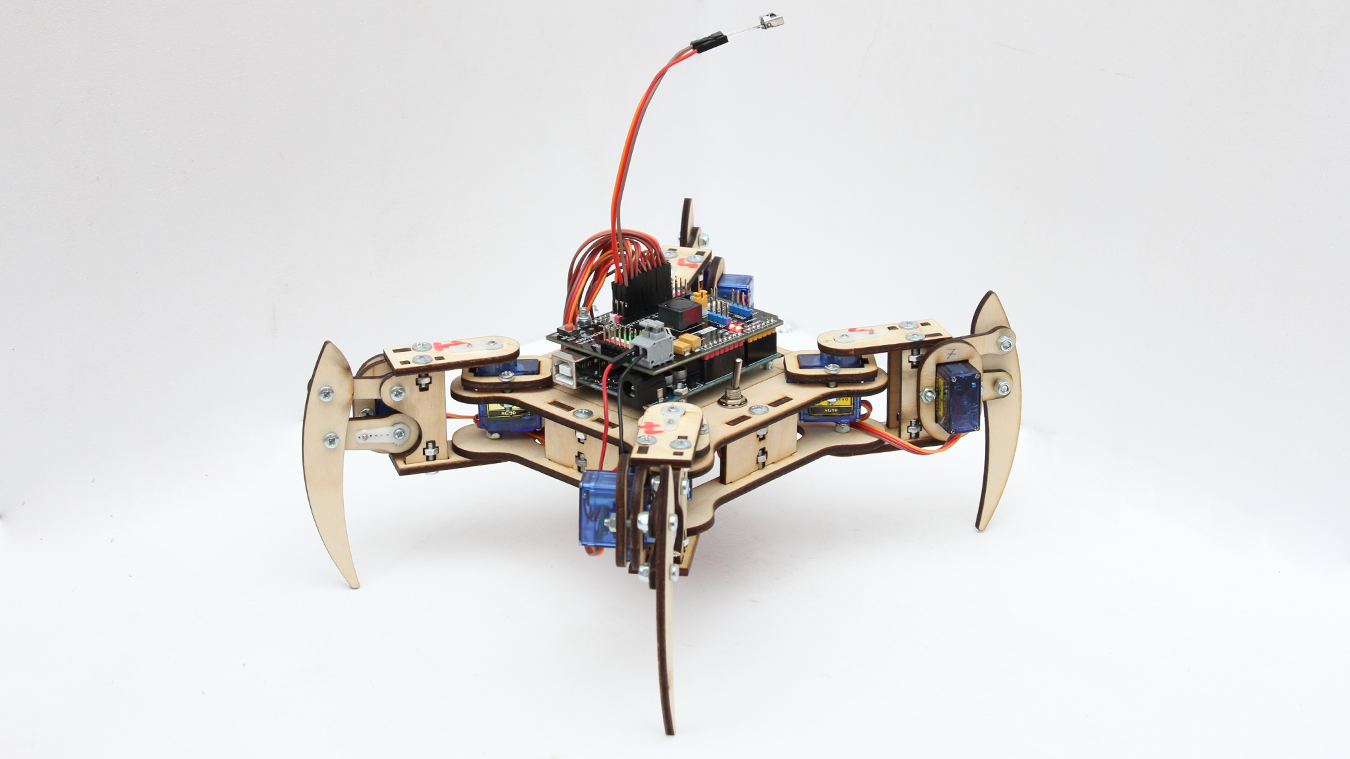
В этом разделе нашего сайта представлены различные платформы и шасси для самостоятельного проектирования роботов на Arduino Ардуино. Например: Arduino Uno. Механика для роботов. Роботы пауки Гусеничные шасси Платформы и шасси Манипуляторы, клешни Колеса для роботов Шаровые опоры Держатели, кронштейны Механика Карданная передача Шестерни Стойки для печатных плат. Акриловая подставка для Arduino Uno, Mega





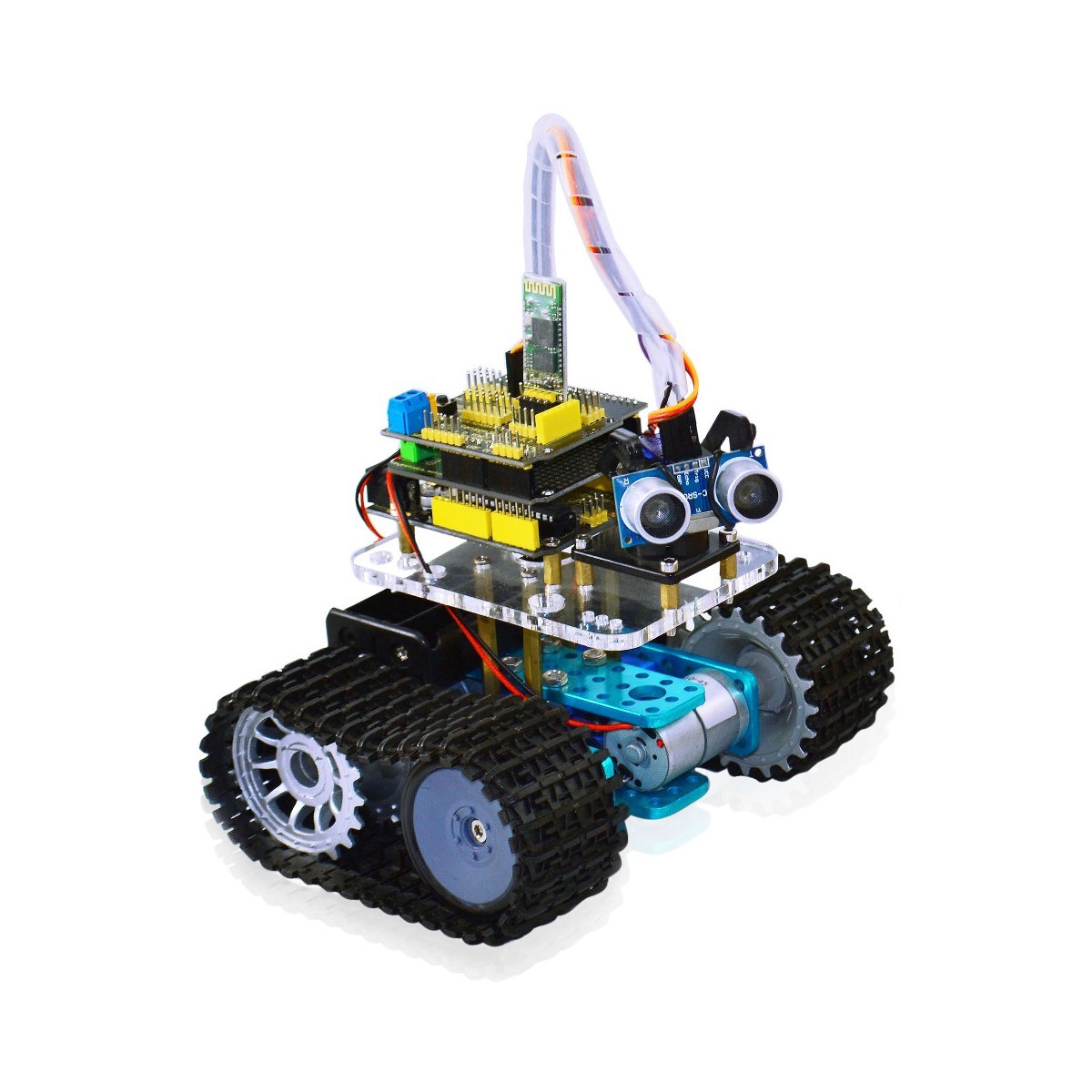
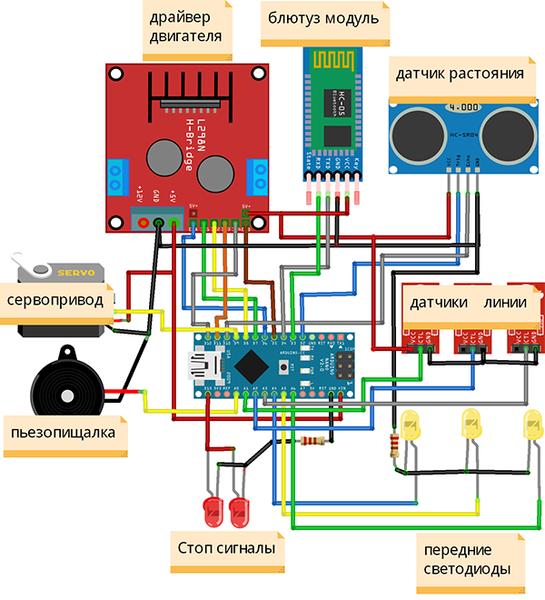
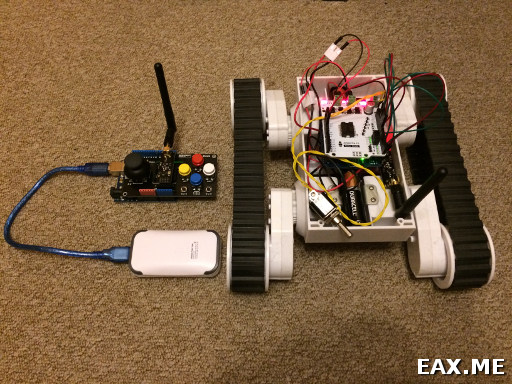
Набор для сборки Smart Car Kit позволит вам собрать полноприводного 4WD колесного робота на базе Arduino-совместимого контроллера. Управление роботом можно организовать с помощью ИК-сенсора или с использованием Bluetooth модуля. С помощью функциональных модулей, входящих в набор, робот может работать в режиме следования по линии, режиме избегания препятствий, режиме охранной сигнализации и др. Для сборки вам потребуется только самый простой ручной инструмент, паяльник и немного воображения. Пример скетча для колесного робота Smart Car Kit - в данном скетче реализована возможность ручного управления роботом через ИК-канал. А также есть автоматический режим, в котором робот "гуляет" сам, избегая столкновений с препятствиями.